Apa Sih PID itu ?
Nah... Beberapa dari kalian yang sekarang duduk dibangku SMK atau yang kuliah maupun yang bekerja pasti pernah dengar istilah PID kan. Jadi PID Controller atau Proportional Integral Derivative Controller adalah mekanisme kontrol loop umpan balik yang banyak digunakan dalam sistem kontrol industri dan berbagai aplikasi lain yang membutuhkan kontrol modulasi terus menerus.
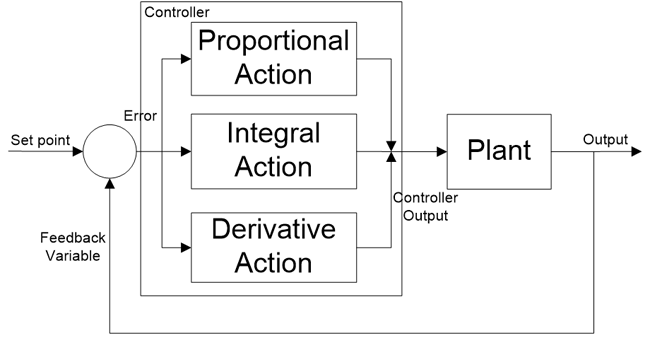
Kontroler PID terus menghitung nilai kesalahan e(t) sebagai perbedaan antara setpoint yang diinginkan (SP) dan variabel proses terukur (PV) dan menerapkan koreksi berdasarkan proporsional, integral, dan turunan.
Dalam istilah praktis dan untuk lebih mudah dipahami PID secara otomatis menerapkan koreksi akurat dan responsif terhadap fungsi kontrol. Contoh sehari-hari adalah kontrol pelayaran pada mobil, di mana pengaruh eksternal seperti bukit (gradien) akan menurunkan kecepatan.
Algoritma PID mengembalikan dari kecepatan saat ini ke kecepatan yang diinginkan secara optimal, tanpa penundaan atau overshoot, dengan mengendalikan output daya mesin kendaraan.

Analisis teoritis pertama dan aplikasi praktis adalah di bidang sistem kemudi otomatis untuk kapal, dikembangkan dari awal 1920-an dan seterusnya. Itu kemudian digunakan untuk kontrol proses otomatis di industri manufaktur, di mana itu secara luas diimplementasikan dalam pneumatik, dan kemudian elektronik, pengendali.
Hari ini ada penggunaan universal konsep PID dalam aplikasi yang membutuhkan kontrol otomatis yang akurat dan dioptimalkan.
Kontroler PID terus menghitung nilai kesalahan e(t) sebagai perbedaan antara setpoint yang diinginkan (SP) dan variabel proses terukur (PV) dan menerapkan koreksi berdasarkan proporsional, integral, dan turunan.
Dalam istilah praktis dan untuk lebih mudah dipahami PID secara otomatis menerapkan koreksi akurat dan responsif terhadap fungsi kontrol. Contoh sehari-hari adalah kontrol pelayaran pada mobil, di mana pengaruh eksternal seperti bukit (gradien) akan menurunkan kecepatan.
Algoritma PID mengembalikan dari kecepatan saat ini ke kecepatan yang diinginkan secara optimal, tanpa penundaan atau overshoot, dengan mengendalikan output daya mesin kendaraan.
Analisis teoritis pertama dan aplikasi praktis adalah di bidang sistem kemudi otomatis untuk kapal, dikembangkan dari awal 1920-an dan seterusnya. Itu kemudian digunakan untuk kontrol proses otomatis di industri manufaktur, di mana itu secara luas diimplementasikan dalam pneumatik, dan kemudian elektronik, pengendali.
Hari ini ada penggunaan universal konsep PID dalam aplikasi yang membutuhkan kontrol otomatis yang akurat dan dioptimalkan.
Komentar
Posting Komentar